马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
图 1 为手术设置和穿刺口位置示意图。

使用 Saroa 系统进行机器人辅助子宫切除术的设置和穿刺口位置。(a) 手术室布局图,图中显示了放置在患者双腿之间的紧凑型患者推车。(b) 穿刺口配置图,图中显示了位于脐部的摄像头端口,以及位于两侧和尾侧的器械端口。R,右臂;S,内窥镜臂;L,左臂;A,助手端口。
全身麻醉诱导后,患者取截石位,并进行 15 度头低脚高位倾斜。手术室整体布局如图 1a 所示。为了便于操作三个机械臂,患者推车放置在患者的左侧。第一助手站在患者左侧进行吸引、牵拉和器械更换,第二助手则位于患者双腿之间操作子宫操纵器。手术室护士位于第一助手的对面。麻醉师位于患者头部,主监视器供助手和手术室护士共同观看,另有一台副监视器提供辅助视觉信息。腹腔镜塔架放置在麻醉师附近,以便于取用设备。首先经脐部插入一个12毫米套管针,然后在脐部两侧分别放置两个11毫米套管针,每个套管针位于脐部两侧8厘米外侧、3厘米尾侧(图1b)。在脐部和左侧腹部套管针中间位置插入一个5毫米套管针,用于放置辅助钳。经脐部穿刺口插入10毫米、30度斜视腹腔镜(奥林巴斯,东京,日本)。所有使用的套管均为ENDOPATH XCEL™无刀片套管(ETHICON,强生公司,辛辛那提,俄亥俄州,美国)。
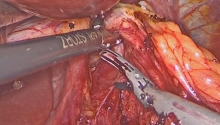
随后将Saroa手术系统的推车置于患者双腿之间(图2a),以便手术助手操作。同时,在机械臂下方也留有足够的空间(图2b),以便容纳第二位助手,并在需要时使用阴道管或子宫托。
图2

机器人辅助子宫切除术中Saroa手术系统的术中设置。(a) 机械臂位于患者上方,紧凑型患者推车置于患者双腿之间,以便手术助手操作。 (b) 机械臂下方留有足够的空间,可容纳第二位助手,以便在需要时使用阴道管或子宫操纵器。
由于其尺寸紧凑,该系统可以轻松推入,从而为手术区域提供畅通无阻的通道。手术器械安装在Saroa手术系统的三个机械臂上,无需对接即可通过端口插入。外科医生在开放式控制台上进行手术,佩戴三维 (3D) 眼镜,并使用配备实时触觉反馈的手持控制器(图3)。
图3

Saroa手术系统的外科医生控制台和导航显示器。(a) 外科医生佩戴三维眼镜,在开放式控制台上操作,使用提供实时触觉反馈的手持控制器,以辅助精确操作器械。(b) 手术过程中使用导航显示器。该显示器可实时显示内窥镜图像和系统状态,从而实现控制台外科医生和手术助手之间的协调。
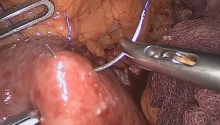
这种配置实现了精准的器械操作和对整个手术过程中抓握力的直观控制。图 4 展示了阴道残端缝合的典型术中图像。在此步骤中,外科医生可通过系统的触觉反馈功能实时感知施加于阴道残端的抓握力。这种感觉输入使得在不施加过大张力或避免缝线断裂的情况下,能够轻柔地处理组织。在整个缝合过程中调节抓握力的能力,确保了缝合的安全性和精准性,从而有助于实现对阴道残端的无创且可控的处理。
图 4

使用 Saroa 手术系统进行阴道残端缝合的术中图像。(a) 阴道残端缝合进行中。(b) 阴道残端缝合完成。 |

 腹腔镜下Whipple手术治疗胰头肿瘤
腹腔镜下Whipple手术治疗胰头肿瘤
 腹腔镜治疗正中弓状韧带综合征(MALS)——
腹腔镜治疗正中弓状韧带综合征(MALS)——
 腹腔镜治疗药物治疗失败后早期小肠梗阻复发
腹腔镜治疗药物治疗失败后早期小肠梗阻复发
 腹腔镜全胃切除术联合吲哚菁绿(ICG)淋巴
腹腔镜全胃切除术联合吲哚菁绿(ICG)淋巴

 发表于 2026-1-8 15:43:55
发表于 2026-1-8 15:43:55
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡