马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册
×
16.1 引言
16.2 理论基础
腹股沟疝修补术是最常见的普通外科手术之一。 已经描述了许多技术,从开放式前部和后部修复,主要组织修复到腹腔镜修复。 对于修复腹股沟疝的理想技术没有普遍的共识。 因此,外科医生应该熟练掌握多种技术,并应根据患者个体需求量身定制手术技术。
与腹股沟疝修复相关的最常见结局指标是复发。 其他结局指标越来越多地应用于这一患者群体,包括疼痛和生活质量。 几种描述的腹股沟疝修补腹腔镜技术已被证实具有低复发率和其他有利结局指标的长期疗效。 在不断努力改善患者护理的同时,外科医生继续改进腹股沟疝修补术的手术技术,不仅关注复发率,还关注生活质量,疼痛以及技术对普通人群的适用性。
机器人手术的使用是外科史上一个重要的里程碑。 虽然最初用于妇科和泌尿外科手术,但普通外科医生正在采用机器人技术进行一般外科手术。 随着机器人设备的更多可用性和访问以及疝手术的通用性,机器人手术越来越多地用于疝修复。 尽管仍被认为是疝手术中的新兴技术,但一些外科医生已经接受了这项技术,并且每天都在使用机器人技术进行这些手术。 随着机器人技术得到更广泛的应用,机器人技术和结果得到了严格的评估,我们可以更全面地评估机器人手术在腹股沟和疝手术中的作用。
使用机器人手术技术进行腹股沟疝修补的原理类似于其他具有一些注意事项的手术。传统的机器人手术提出的优势包括外科医生改进的可视化,灵活性和人体工程学。另一个潜在的优势是机器人技术可能有助于使用微创技术进行技术上困难的手术,否则这些手术可能难以完成腹腔镜手术。这可能是微创或腹腔镜腹股沟疝修补的重要优势。尽管许多外科医生熟练使用腹腔镜腹股沟疝修补术,但学习报告的学习曲线多达250例是一个困难的过程。腹腔镜手术对于腹股沟疝修补的采用也很缓慢,即使适应证广泛包括复发性和双侧腹股沟疝修补。尽管在一些患者群体中腹腔镜腹股沟疝修补术的使用正在增加,但该技术的相对缓慢采用可能是由于在学习该程序方面的一些教育和技术差距。如果机器人技术能够缩短学习曲线或改善对腹股沟疝最小侵入性方法的采用,那么它必须被认为是一种可行的方法,并且有必要努力评估该技术用于腹股沟疝修补术。
16.3 机器人腹股沟疝的手术技巧
机器人腹股沟疝修补技术是基于腹腔镜经腹腹膜前途径(TAPP)的方法,并应复制这种描述良好的手术。 与TAPP程序一样,机器人方法中必须遵循几个关键原则才能实现类似的结果。 这些包括解剖整个肌腱膜孔和所有可能的疝空间(包括输精管下方的输精管/绳索或圆韧带),放置在耻骨下延伸并适当固定的大网状假体。
以下描述使用Da Vinci Si机器人模型。 根据外科医生的偏好获得腹腔镜通路,通常通过脐上方或下方的开放式切割技术(Hasson或脐技术)完成。 放置11或12毫米套管针,并用10毫米30°相机检查腹部。 证实存在腹股沟疝后,将患者置于特伦德伦伯格位置,并将两个8-mm端口放置在双侧,位于脐上端口外侧约10-cm处(图16.1)。 然后将机器人从侧面对接(图16.2),以修复双侧腹股沟疝。 较新的达芬奇希模型更容易设置和更低的端口。
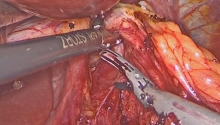
一个30°朝上的相机与一把抓钳(Prograsp™镊子)和带电烙刀的剪刀一起使用。 将腹膜从内侧脐韧带切开至髂前上棘。 然后使用主要钝器解剖和偶尔使用电烙术形成腹膜前皮瓣(图16.3)。 在制作足够大小的腹膜瓣后,注意力转向盆底剥离,这应该与腹腔镜TAPP手术中的相似。 此时,更换另一个Prograsp™或马里兰钳的剪刀臂是有用的。 解剖从耻骨和库珀韧带的识别开始。 然后横向取出解剖,确定下腹壁血管并解剖疝囊和脊髓结构的后外侧。 使用钝性解剖,疝囊从绳索结构分离。

图16.1设置机器人腹股沟疝气口,与腹腔镜手术(TAPP)中使用的类似。 在脐孔的上方或下方放置11-mm套管针,将两个8-mm套管针放置在紧邻脐孔水平以上的锁骨中线处,将囊切断。 这将需要最终关闭腹膜缺陷。 如果脐脂肪瘤存在,应该减少并切除或留在腹膜后。 解剖完成后,输精管,精索血管,髂血管和盆底解剖应处于平面图中(图16.4)。
注意力转向网格布局。腹腔镜或机器人腹股沟疝修补的潜在益处之一是能够在腹股沟区域放置大网眼假体,以覆盖所有可能的疝缺陷。通常可以放置至少10⁜×⁜15厘米的网格,我们经常放置一个12⁜×⁜15厘米的网格(图16.5)。网格的选择由外科医生决定,但常常使用未涂布的聚丙烯或聚酯网。几种网状技术用于机器人腹股沟疝修补术。有时使用较新的自固定聚酯网,因为这种网可能不需要固定。由于灵巧性更好,这种网格难以在学习曲线的腹腔镜下放置,因此使用机器人技术可能更容易放置。这很可能是为什么许多外科医生已经开始使用这种网格。与平网片相比,其它预成型并与腹股沟区域一致的聚丙烯网片也可能更容易放置。但是,目前还没有证据表明使用这些新型网格技术可以改善结果。
网片固定方法最终由外科医生决定。然而,关于理想的腹腔镜/机器人腹股沟疝修补术中的理想固定方法仍存在争议,从大头钉到缝合到胶水到不固定。由于机器人腹股沟疝修补的费用是一个值得关注的问题,因此外科医生应该知道他们医院的各种固定方法的费用,并且如果能够实现类似的结果和疗效,则尽量降低这些费用。也许为了通过机器人手术降低成本并可能减少疼痛,一些传统上使用粘性固定的外科医生采用了缝合固定。此外,许多外科医生还采用缝合固定网片,因为与腹腔镜缝合相比,一些使用机器人进行缝合的外科医生获益明显。对于网状物的缝合固定,与腹腔镜技术相同的原理适用。避免固定在疼痛和死亡的三角区域,以避免潜在的血管和神经损伤。我们的理念是将缝线放置在类似的配置中以固定。我们通常在耻骨/库珀韧带和前内侧和外侧腹壁使用缓慢吸收的缝线进行三点固定(图16.6和16.7)。将网片缝合到Cooper韧带有时很具有挑战性。将30°摄像头切换到朝下可以使其更容易。尽管与腹腔镜缝合相比,大多数外科医生更容易缝合机器人技术,但仍有学习曲线。与使用腹腔镜方法相比,这通常是增加手术时间的手术部分。随着机器人技术手术技巧的提高,可采用多种技术来提高效率并缩短手术时间。使用短缝线通常有助于缝合时需要多个间断缝合;但是,通过其中一个机器人端口放置和更换针头通常会增加操作时间。在掌握机器人技术之初,一些外科医生增加了一个额外的端口以便于放置和更换针头,因此不必移除机器人端口。其他外科医生在将机器人对接之前通过11毫米端口将所需的网状物和缝合线放入腹腔中,因此不需要进行交换。但是,外科医生必须确保这些手术不在视野之外或在手术过程中丢失,因为定位这些会增加手术时间。在外科医生掌握了机器人缝合之后,另一种节省时间的技术是通过使用更长的缝合线来固定所有网格点来最小化缝合线的数量,因此缝合线的交换被最小化。网片固定后,将剩余的Vicryl缝线和针头取下,并将腹膜封闭。再次,腹膜闭合技术由外科医生决定。然而,用于网状固定的相同逻辑可应用于腹膜闭合。许多外科医生使用缝合线来封闭腹膜,因为使用机器人技术可以更容易地完成。虽然两端都结有可运行的可吸收缝线对腹膜闭合非常有效且可行,但一些外科医生使用不需要结节的新型带钩缝合线(图16.8)。尽管它们被广泛使用,但没有关于这些倒钩缝合用于腹膜闭合效果的实质性数据。外科医师不同意这些缝合线是否需要在最后连接结,或者是否在末端追溯几次导线足以确保闭合。需要额外的数据来充分评估这种做法。已有报道腹膜瓣在使用带刺缝合线后重复腹腔镜重新开放。这会导致肠梗阻。当决定在机器人腹股沟疝修补术中使用哪种闭合技术时,需要考虑与腹膜闭合有关的这些和其他潜在问题和并发症。随着越来越多的外科医生采用这种技术,使用各种固定方法和网格,关于理想网片选择和固定方法的进一步数据将可能出现。

图16.2机器人控制台与控制台从患者左侧的脚进入的侧面对接。 机器人外科医生在控制台,并控制相机和两个操作手臂
16.4 文献
很少有研究检查机器人腹股沟疝修补术。 该技术首次在病例报告和病例系列中与机器人前列腺切除术一起描述。 没有发表的研究比较腹腔镜TAPP和机器人TAPP。 由Dominguez等人发表的仅一篇发表的病例系列报道了78例正在进行的机器人TAPP而没有伴随前列腺切除术的结果。 他们报告此方案的安全性和可行性,血肿发生率3.9⁜%,血清肿率2.6⁜%,手术部位感染率1.3⁜%,4周随访时无死亡或复发。 这些并发症发生率与腹腔镜完全腹膜外(TEP)和TAPP修补相比有利。 随机研究直接比较腹腔镜和机器人修复与长期随访和成本比较,需要得出确凿的结论。

图16.3使用剪刀和马里兰解剖器进行的腹膜前剥离。 解剖应遵循与腹腔镜TAPP手术相同的步骤

图16.4机器人腹股沟解剖,减少直接缺损和解剖肌层孔。 广泛的解剖允许大网布置和覆盖所有可能的疝空间。 对血管和输精管的腹膜下层剥离也有助于防止下壁复发

图16.5用聚丙烯网覆盖广泛的直疝缺陷。 网格覆盖并延伸到耻骨下方并穿过中线

图16.6将网片在耻骨/ Cooper韧带处缝合固定直接缺损

图16.7缝合固定在腹壁上的聚丙烯网片的前内侧边缘上。 三点缝合固定类似于腹腔镜手术中描述的粘连固定

图16.8使用带倒钩的缝线封闭腹膜。 腹膜已用此缝线缝合,现在正在追溯以确保安全闭合
16.5 机器人腹股沟疝修补术的争议
关于机器人腹股沟疝修补的争议通常与功效和相关成本有关。虽然批评人士指出机器人在两种描述良好的腹腔镜手术(TAPP和TEP)中潜在成本增加,并且具有良好的长期疗效和结果,但机器人技术的成本比较仍处于起步阶段,可能并不准确。然而,如果使用机器人技术与腹腔镜技术相比增加成本而没有明显的益处(即没有附加价值),则机器人技术将不能存活。在使用机器人技术时成本控制应该成为外科医生的主要焦点。可能的成本控制的几个领域包括最小化仪器使用,缝合网和腹膜,而不是使用钉合装置,以及选择更便宜的网状假体。但是,成本计算可能会因各种因素而在机构间变化很大,例如医院与网状和固定产品行业的合同。外科医生应该把重点放在地方一级的成本降低上。但是,如前所述,成本不应该成为机器人技术的唯一焦点,因为该技术可以帮助外科医生成功完成复杂的微创手术,而这些手术不可能使用其他技术。
机器人腹股沟疝修补术的疗效将会进行辩论,直到发表长期良好的研究结果。 虽然腹股沟疝修补的机器人方法应与腹腔镜TAPP的相似,但可能存在细微差异,如固定或解剖腹膜前间隙。 只有比较数据才能证明这种技术是否有效。 目前几项随机对照试验正在累积患者,并应帮助解决机器人腹股沟疝修复的有效性。
与机器人腹股沟疝修复相关的结果必须与其他技术相比较,以确定与手术相关的结果可能的差异。 一种提出的机器人腹股沟疝修补术的优点是,网状物和腹膜的缝合更容易,并且可能比粘合腹膜和腹膜更少的疼痛。 目前关于固定方法是否会显着改变疼痛尚未达成共识,而对此的确定需要进一步研究。
16.6 机器人腹股沟疝修补术的未来发展方向
使用机器人技术进行腹股沟疝修复的未来方向是多方面的。一些研究人员正在评估这种技术和方法如何应用于TEP修复。机器人手术在腹股沟疝修补术中的应用仍然存在争议。然而,在回顾了该技术如何应用​​以及缩短学习曲线和使外科医生使用微创技术治疗腹股沟疝修补术的潜在益处后,显然机器人腹股沟疝修复应该进一步研究。一些随机试验正在进行中,包括比较机器人腹股沟疝和传统腹腔镜腹股沟疝的多中心试验。此外,未来几年可能会出现几种新的机器人平台,这些平台可能会解决当前设备的一些短缺问题,并可能降低成本。包括新机器人课程和居留培训在内的教育工作无疑将对学习曲线的缩短以及机器人技术对普通外科医生的熟悉产生巨大影响。通过这些努力,进一步研究以及添加注册数据来记录现实世界的使用和结果,我们可以更好地分析机器人手术在腹股沟疝修复中的作用。
参考:Textbook of Hernia |

 腹腔镜全胃切除术治疗胃癌中采用线性吻合器
腹腔镜全胃切除术治疗胃癌中采用线性吻合器
 腹腔镜下Whipple手术治疗胰头肿瘤
腹腔镜下Whipple手术治疗胰头肿瘤
 腹腔镜治疗正中弓状韧带综合征(MALS)——
腹腔镜治疗正中弓状韧带综合征(MALS)——
 腹腔镜治疗药物治疗失败后早期小肠梗阻复发
腹腔镜治疗药物治疗失败后早期小肠梗阻复发

 发表于 2018-5-15 20:37:57
发表于 2018-5-15 20:37:57
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡